
الکتروموتور یا موتور الکتریکی یک ماشین الکتریکی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. بیشتر الکتروموتورها از طریق برهم کنش بین میدان مغناطیسی موتور و جریان الکتریکی در سیم پیچ کار میکنند. این تعامل نیرویی (طبق قانون فارادی) به کل، گشتاور ایجاد میکند که به محور موتور اعمال میشود. امروزه برندهای مختلفی از آن در سراسر جهان تولید میشود که از نظر کیفیت متریال و کاربرد و توان با یکدیگر متفاوت هستند، برای مثال الکتروموتور کاجیلی ساخته شده در کشور چین.

الکتروموتور سری CDF
الکتروموتور سری YC

الکتروموتور سری ML

الکتروموتور سری MS
الکتروموتور الکتریکی چیست؟
موتورهای الکتریکی را میتوان از منابع جریان مستقیم DC (direct current) مانند باتری یا یکسو کننده تغذیه کرد یا با استفاده از منابع جریان متناوب AC (alternating current) (اینورتر، ژنراتور الکتریکی یا شبکه برق) تغذیه نمود. حضور الکتروموتور در زندگی روزمره به دلیل فناوریهایی است که ما در قرن ۲۱ از آنها لذت میبریم. بدون موتور الکتریکی، ما هنوز در دوران سر توماس ادیسون زندگی میکردیم، جایی که تنها هدف برق حضور در لامپها بود.
موتورهای الکتریکی در اتومبیلها، قطارها، ابزارهای برقی، فنها، تهویه مطبوع، لوازم خانگی، درایوهای دیسک و موارد دیگر یافت میشوند. برخی از ساعتهای برقی هم حتی از موتورهای کوچک استفاده میکنند. انواع مختلفی از موتورها وجود دارد که برای اهداف مختلف توسعه یافته اند. اصل اساسی در عملکرد یک موتور الکتریکی، قانون القایی فارادی است. یعنی زمانی که جریان متناوب با یک میدان مغناطیسی متغیر در تعامل است، نیرویی ایجاد میشود.
از زمان اختراع موتورها، پیشرفتهای زیادی در این زمینه مهندسی صورت گرفته است و این موضوع برای مهندسان مدرن به موضوعی بسیار مهم تبدیل شده است. در ادامه همه موتورهای الکتریکی اصلی مورد استفاده در عصر حاضر را مورد بحث قرار میدهیم.
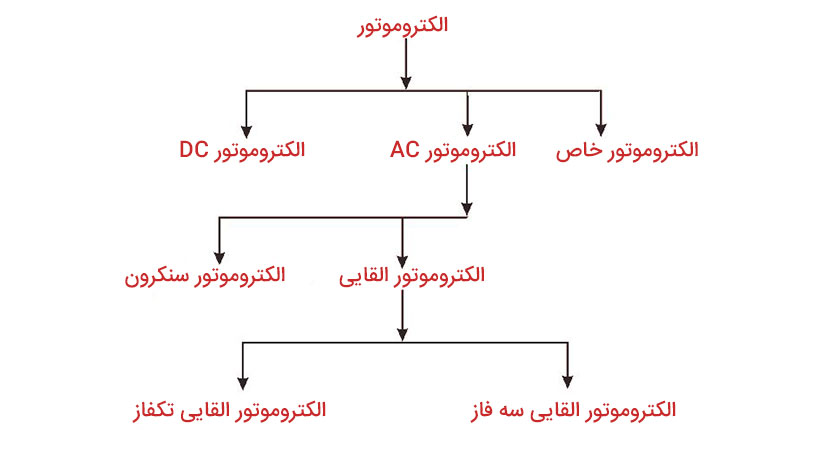
انواع الکتروموتور Electric Motors
انواع موتور الکتریکی عبارتند از:
- موتورهای DC
- موتور القایی سه فاز و موتورهای القایی تک فاز
- موتورهای سنکرون Synchronous Motors
- سایر موتورهای خاص
موتورها در نمودار زیر طبقهبندی شده اند:
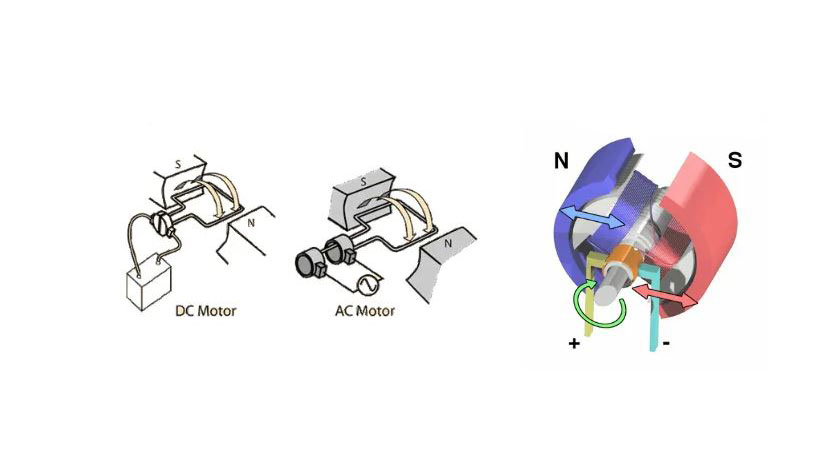
الکتروموتور DC
در بین چهار طبقهبندی اصلی الکتروموتور ذکر شده در بالا، موتور DC، همانطور که از نامش مشخص است، تنها موتوری است که توسط جریان مستقیم هدایت میشود. این ابتداییترین نسخه موتور الکتریکی است که در آن گشتاور چرخشی به دلیل جریان از طریق رسانا در داخل میدان مغناطیسی تولید میشود.
بقیه انواع الکتروموتورها همگی موتورهای الکتریکی AC هستند و توسط جریان متناوب هدایت میشوند، برای مثال، موتور سنکرون که همیشه با سرعت همزمان کار میکند.
الکتروموتور DC چگونه کار میکند؟
اصل کار موتور DC عمدتا به قانون دست چپ فلمینگ بستگی دارد. در یک الکتروموتور DC اصلی، یک آرماتور بین قطبهای مغناطیسی قرار میگیرد. سیم پیچ آرماتور توسط منبع DC خارجی تامین میشود، جریان از طریق هادیهای آرماتور شروع میشود. هنگامی که رساناها، جریان را در داخل میدان مغناطیسی حمل میکنند، نیرویی را تجربه میکنند که تمایل به چرخاندن آرمیچر دارد. فرض کنید هادیهای آرماتور زیر N قطب آهنربای میدان، جریان را به سمت پایین (صلیب) و آنهایی که زیر قطب S هستند، جریان را به سمت بالا (نقاط) حمل میکنند.
با اعمال قانون دست چپ فلمینگ، جهت نیروی F که توسط هادی در زیر قطبهای N تجربه میشود و نیرویی که هادیها در زیر قطبهای S تجربه میکنند، تعیین میشود. مشخص شده است که در هر لحظه نیروهایی که هادیها تجربه میکنند در جهتی هستند که تمایل دارند آرمیچر را بچرخانند.
باز هم، به دلیل این چرخش، هادیهای زیر قطبهای N زیر قطب S و هادیهای زیر قطبهای S زیر قطب N قرار میگیرند. در حالی که رساناها از قطبهای N به قطب S و قطبهای S به قطب N میروند، جهت جریان از طریق آنها با استفاده از کموتاتور معکوس میشود.
با توجه به این وارونه شدن جریان، همه رساناها تحت قطبهای N قرار میگیرند که جریان را به سمت پایین و همه رساناها تحت قطبهای S قرار میگیرند که جریان را به سمت بالا حمل میکنند، همانطور که در شکل نشان داده شده است. بنابراین، هر هادی تحت نیروی تجربی قطب N در یک جهت قرار میگیرد و همین امر برای هادیهای زیر قطب S صادق است. این پدیده به ایجاد گشتاور پیوسته و یک طرفه کمک میکند.
به بیان دیگر نحوه عملکرد موتور الکتریکی DC
در اینجا روتور یک آهنربای الکتریکی است که با میدان مغناطیسی چرخان استاتور به صورت مغناطیسی قفل شده و با آن میچرخد. سرعت این ماشینها با تغییر فرکانس (f) و0 تعداد قطبها (P) متفاوت است، به عنوان مثال Ns = ۱۲۰ f/P.
در نوع دیگری از موتور AC که میدان مغناطیسی دوار رساناهای روتور را قطع میکند، از این رو جریان گردش ناشی از این هادیهای کوتاه اتصال روتور را تحریک میکند. با توجه به فعل و انفعال میدان مغناطیسی و این جریانهای در حال گردش، روتور شروع به چرخش میکند و به چرخش خود ادامه میدهد.
این یک الکتروموتور القایی است که به موتور آسنکرون نیز معروف است؛ زیرا با سرعتی کمتر از سرعت موتور سنکرون خود کار میکند و گشتاور و سرعت چرخش با تغییر لغزش تنظیم میشود، که تفاوت بین سرعت همزمان Ns و سرعت روتور Nr،
S = NS – Nr / NS
این دستگاه بر اساس اصل القای EMF به دلیل متغیر بودن چگالی شار عمل میکند. از این رو نام ماشین القایی نامیده شده است.
الکتروموتورهای القایی
الکتروموتور القایی تک فاز مانند الکتروموتور سه فاز، بر اساس اصل القای EMF به دلیل شار کار میکنند. اما برخلاف الکتروموتور سه فاز، موتورهای تک فاز با منبع تغذیه تک فاز کار میکنند. روشهای راه اندازی الکتروموتور تکفاز توسط دو نظریه کاملاً تثبیت شده، یعنی نظریه میدان دو چرخش دوگانه و نظریه کراسفیلد، اداره میشود.
به غیر از چهار نوع موتور اصلی ذکر شده در بالا، چندین نوع موتور الکتریکی خاص وجود دارد.
انواع الکتروموتور القایی یا آسنکرون
موتورهای القایی به دو نوع موتور القایی تک فاز و موتور القایی سه فاز طبقه بندی میشوند. همانطور که از نام آنها مشخص است، یک موتور القایی تکفاز به منبع تغذیه AC تک فاز متصل است در حالی که موتور القایی سه فاز میتواند به یک منبع تغذیه AC سه فاز متصل شود.
الکتروموتور القایی چگونه کار میکند؟
عملکرد الکتروموتور الکتریکی القایی کمی متفاوت از موتور DC است. در موتور القایی تک فاز، هنگامی که یک سیم تک فاز به سیم پیچ استاتور داده میشود، یک میدان مغناطیسی ضربان دار تولید میشود و در یک موتور القایی سه فاز، هنگامی که سه سیم پیچ به سیم پیچ استاتور سه فاز داده میشود، یک میدان مغناطیسی دوار تولید میشود.
روتور موتور القایی یا از نوع سیم پیچی بوده و یا از نوع قفس سنجابی. نوع روتور هر چه باشد، رساناهای روی آن در انتها کوتاه میشوند تا حلقه بسته ایجاد شود. به دلیل چرخش میدان مغناطیسی، شار از شکاف هوا بین روتور و استاتور عبور میکند، از سطح روتور عبور کرده و هادی روتور را قطع میکند.
بنابراین طبق قانون القایی الکترومغناطیسی فارادی، جریان القایی در رساناهای روتور بسته وجود خواهد داشت. مقدار جریان القایی، متناسب با میزان تغییر پیوند شار با توجه به زمان است. باز هم این میزان تغییر پیوند شار متناسب با سرعت نسبی بین روتور و میدان مغناطیسی دوار است. طبق قانون لنز، روتور سعی خواهد کرد تا هر چه که باعث ایجاد جریان در آن میشود را کاهش دهد. از این رو روتور میچرخد و تلاش میکند تا سرعت میدان مغناطیسی دوار را بدست آورد تا سرعت نسبی بین روتور و میدان مغناطیسی دوار را کاهش دهد.
الکتروموتور آسنکرون چگونه کار میکند؟
در موتور سنکرون، وقتی تغذیه متوازن سه فاز به سیم پیچ استاتور سه فاز ثابت داده شود، یک میدان مغناطیسی دوار تولید میشود که با سرعت همزمان میچرخد. حال اگر یک آهنربای الکترومغناطیسی در داخل این میدان مغناطیسی دوار قرار داده شود، با میدان مغناطیسی دوار به صورت مغناطیسی قفل شده و میدان اول با میدان مغناطیسی دوار با همان سرعتی متناسب با موتور سنکرون میچرخد.
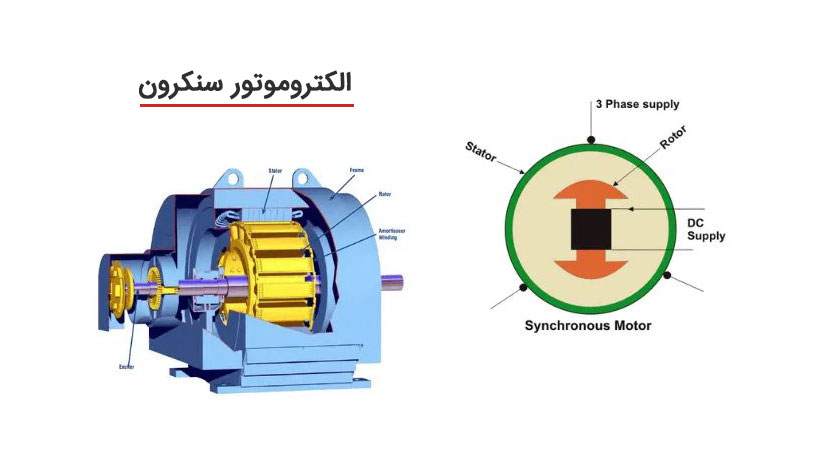
الکتروموتور سنکرون
موتور سنکرون یک موتور AC است که در آن چرخش روتور (یا محور) با فرکانس جریان تغذیه همزمان میشود. یعنی دوره چرخش روتور برابر با میدان چرخش دستگاهی است که داخل آن قرار دارد. متداولترین نوع موتورهای سه فاز، الکتروموتور سنکرون و موتورهای القایی هستند. هنگامی که رساناهای الکتریکی سه فاز در موقعیتهای هندسی خاصی قرار میگیرند (یعنی در زاویه خاصی از یکدیگر) میدان الکتریکی ایجاد میشود. میدان مغناطیسی دوار با سرعت خاصی میچرخد که به سنکرون معروف است. معمولاً، ساختار آن تقریباً شبیه موتور القایی سه فاز است، با این تفاوت که در اینجا DC را به روتور عرضه میکنیم.
ویژگیهای اصلی موتورهای سنکرون
- موتورهای سنکرون ذاتاً خود راهانداز نیستند. آنها به برخی از وسایل خارجی نیاز دارند تا سرعت خود را قبل از همگامسازی به سرعت همزمان نزدیک کنند.
- سرعت کار با فرکانس تغذیه هماهنگ است و بنابراین برای فرکانس تغذیه ثابت، صرف نظر از شرایط بار، به عنوان موتور سرعت ثابت عمل میکنند.
- این موتور دارای ویژگیهای منحصر به فردی است که تحت هر ضریب توان الکتریکی کار میکند. این باعث میشود از آن در بهبود ضریب توان الکتریکی استفاده شود.
الکتروموتورهای خاص
اینها شامل؛
- موتورهای القایی خطی (LIM)
- موتورهای hysteresis
- استپر موتورها
- سروو موتور
هر یک از این موتورها دارای ویژگیهای خاصی هستند که با توجه به نیازهای صنعت یا برای استفاده در یک ابزار خاص توسعه یافته اند. به عنوان مثال، یک موتور هیسترزیس به دلیل ماهیت کوچک و جمع و جور در ساعتهای دستی استفاده میشود.
تاریخچه الکتروموتور
در سال ۱۸۲۱، دانشمند انگلیسی مایکل فارادی تبدیل انرژی الکتریکی به انرژی مکانیکی را با قرار دادن یک رسانای حامل جریان در میدان مغناطیسی توضیح داد که منجر به چرخش هادی به دلیل گشتاور تولید شده توسط عملکرد متقابل جریان و میدان الکتریکی شد.
بر اساس اصل او، اولین الکتروموتورها، دستگاه DC (جریان مستقیم)، توسط دانشمند انگلیسی دیگر ویلیام استرجن در سال ۱۸۳۲ طراحی شد. اما مدل او بسیار گران بود و برای هیچ هدف عملی استفاده نمیشد. بعداً در سال ۱۸۸۶، اولین موتور الکتریکی توسط دانشمند فرانک جولیان اسپراگ اختراع شد. این دستگاه قادر به چرخش با سرعت ثابت در محدوده بارهای مختلف و در نتیجه حرکت موتور مشتق شده است.
مشاوره خرید الکتروموتور
برای خرید الکتروموتور باکیفیت کافی است که با کارشناسان ما در نمایندگی کاجیلی تماس بگیرید. مشاوران ما در تمام روزهای هفته آماده خدمت رسانی در جهت خرید الکتروموتور مناسب و الکتروموتور ارزان قیمت برای شما هستند. همینطور میتوانید لیست قیمت انواع الکتروموتور را داشته باشید و با توجه به نیاز خود و راهنمایی کارشناسان بهترین خرید خود را داشته باشید.
فاکتورهای اساسی برای انتخاب یک الکتروموتور همه منظوره عمدتاً مشخصات و کاربرد الکتروموتور است. موتورهای الکتریکی طیف وسیعی از کاربردها را شامل میشود که شامل مصارف صنعتی معمولی مانند دمندههای فشاری، فن ها، پمپها و ابزارهای برقی میشود. همچنین، آنها در بسیاری از کاربردهای کوچک مربوط به الکترونیک و رباتیک استفاده میشوند.
نکاتی که هنگام خرید الکتروموتور باید به خاطر بسپارید
فاکتورهای کلیدی که در انتخاب الکتروموتور باید در نظر گرفته شود عبارتند از:
#۱) فاز الکتروموتور
در محل نصب، تکفاز یا سه فاز داریم و بسته به آن باید مدلهای تک فاز یا سه فاز را انتخاب کرد. یک موتور تک فاز میتواند با منبع تغذیه سه فاز کار کند. با این حال، برعکس آن جوابگو نیست.
#۲) جریان الکتروموتور
این نیاز اساسی برای عملکرد هر موتوری است و درجه جریان نامناسب ممکن است منجر به گرم شدن بیش از حد یا عملکرد ضعیف محصول شود. جریان عملیاتی، مقدار جریانی است که موتور تحت بار معمولی خارج میکند. اگر موتوری را انتخاب کنیم که در یک بار معمولی جریان زیادی میکشد، ممکن است منجر به گرم شدن بیش از حد و در نهایت آسیب رساندن به آن شود. امتیاز جریان موتور بر حسب آمپر اندازه گیری میشود.
#۳) ولتاژ موتور الکتریکی
ولتاژ مسئول حفظ جریان ثابت به موتور و جلوگیری از هرگونه جریان برگشتی است. ولتاژ به طور مستقیم با گشتاور متناسب است. اگر موتوری با ارزش بالاتر از بار خود انتخاب کنیم، ممکن است منجر به جریان بیش از حد و گرمای بیش از حد شود که عملکرد نامطلوبی را تحت تأثیر قرار دهد.
#۴) سرعت یا دور در دقیقه
چرخش در دقیقه یک عامل کلیدی در خرید الکتروموتور است و کاملاً به کاربردهای اصلی آن بستگی دارد. مثلا برای کاربردهای صنعتی مانند دمندههای تحت فشار بیشتر میتوانید ۲۸۸۰ دور در دقیقه را استفاده کنید.
#۵) اندازه قاب یا سایز فریم موتور
در هنگام نصب الکتروموتور در تنظیمات مورد نیاز، نقش مهمی ایفا میکند. بسته به نوع نصب موجود و محل جعبه اتصال، اندازه قاب استاندارد است و باید بر اساس آن انتخاب شود.
#۶) محفظهها
بسته به محیطی که قرار است موتور در آن نصب شود، یک محفظه مناسب باید انتخاب شود. محفظهها از قسمتهای داخلی موتور محافظت میکنند. موتورهایی که قرار است در اتمسفر محیطی استفاده شوند دارای محفظههای Open Drip Proof هستند. برای حداکثر حفاظت، حتی در شرایط خطرناک، محفظههای کاملاً محصور با فن خنک شونده (TEFC) ترجیح داده میشوند.